 |
 |
 |
The OMIV LiDAR Service consists in acquiring Very-High Resolution Digital Elevation Models (VHRDEMs) of relevant landslide areas through repeated terrestrial LiDAR surveys (TLS). The Service is complementary to the GPS Service as it allows to monitor large surfaces.
The displacement and strain fields are monitored by TLS at Super-Sauze, La Valette and Villerville for which LiDAR observations are acquired four times per year (April/May, June, July, October). Specific protocols are used for the acquisition at each site.
Field surveys
The instrument used for the acquisition is a long-range Optech ILRIS 3D laser scanning (wavelength of 1500nm). The laser scanner system measures the distance to the target (e.g. slope) using the principle of the time-of-flight. Mirrors inside the scanner allow the acquisition on a 40°x40° field of view at a scanning rate of ca. 2500 pts.s-1, an angular accuracy of 1.15 10-3° and an angular divergence of 9.74 10-3°. The range of the laser scanner is about 800 m in field conditions. At each acquisition, the Cartesian coordinates of each target point is obtained with a normalized intensity value.
Data acquisition
Average distances from the base points and the targets are around 100m/200m. At this distance, the footprint of the laser beam at the ground surface is estimated at 4 cm. Stable slopes around the landslide are systematically included in the scans for the co-registration of the time series point clouds. As such rough terrains yield higher reliability in the co-registration, higher point density scans are systematically acquired to increase the topographic resolution. The short distance between the landslide and the stable slopes is an advantage for very accurate alignments. Only the last return pulse is registered to maximize the number of points reflected at the ground surface. The point clouds are constituted of 9 to 12 millions of points heterogeneously distributed on the topographic surface. The average point density at the ground surface varies from 100 to 250 pts.m-2 between consecutive surveys.
Data processing
The point clouds processing includes:
- the filtering of the vegetation
- the alignment of the point clouds in case of multi-views acquisitions
- the co-registration in a common local coordinate system by aligning the TLS surveys on stable parts at the surroundings of the landslide
- the application of a perspective projection to simulate the 3D point clouds in a 2D regular grid perpendicular to the viewing direction of the scanner
- the calculation of the gradient of the distance separating the point clouds from the scanner location
- the correlation (using a hierarchical and multi-scale digital image correlation algorithm) of the textured gradient images
- the comparison of the displacement images among two dates to displacement maps created with the classical Iterative Closest Point algorithm
 |
|
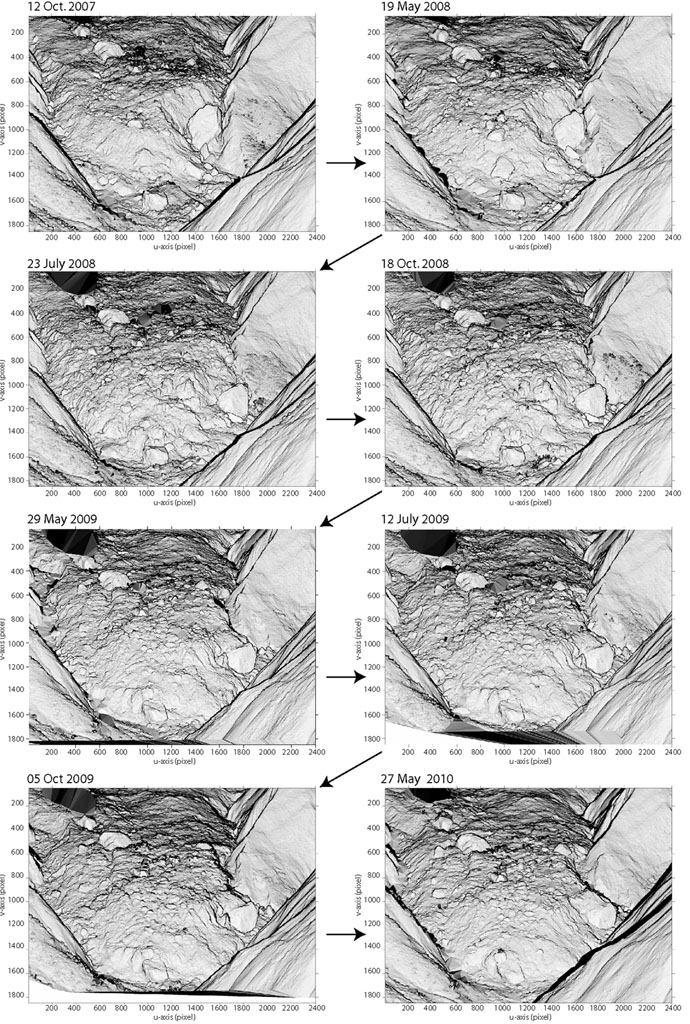
Example of results for Super-Sauze landslide: Images derived from the gradient calculation on the TLS point clouds. The morphology of the landslide toe is very well represented and the progression of the landslide toe is also particularly highlighted (acquisition period: 2007-2010). |